
S – Series (Semiconductor)
S - Series는 VARO Robotics의 반도체 분야 로봇 (Semiconductor) 라인업입니다.
정밀하고 최적화된 모션 및 다양한 타입의 그립퍼를 통해 여러 작업 환경에서의 워크 반송에 적합합니다.
Wafer Transfer Robot(Single)Wafer Transfer Robot(Double)Wafer Pre-Aligner
VSW-S3160
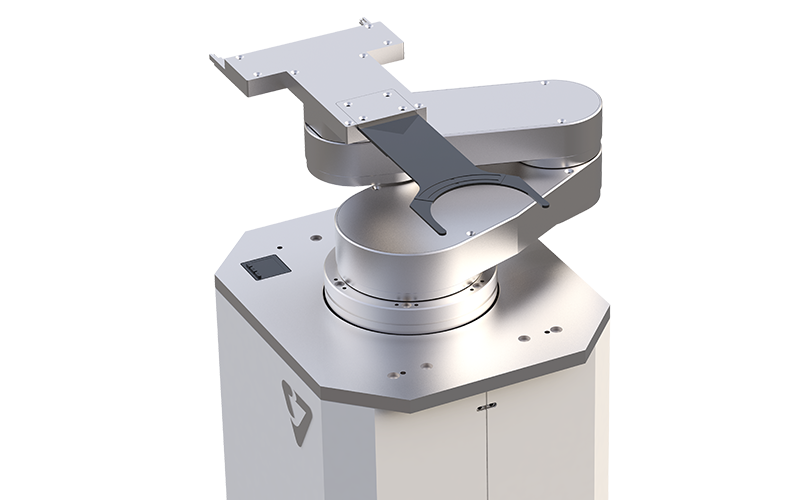
클린룸 대응 VSW 시리즈
앱솔루트 서보모터를 사용하며 정확하고 안정성이 높은 시리즈
다양한 타입의 그립퍼 적용으로 여러 작업환경에서 워크 반송에 적합한 시리즈
특징
정밀한 동작과 최적화 된 모션으로 신속하고 안전한 웨이퍼 핸들링 가능
설비의 설치 환경에 따라 베이스타입, 플랜지 타입 선택 가능
높은 신뢰성과 유지 보수 편의성을 제공
커버를 열지 않고 엔코더 베터리 교체 가능
직관적인 티칭팬던트 UI 구성




Robot
| Specificatioin | WTR Single | WTR Double |
|---|---|---|
| Model | VSW-S3160-300-AV-M | VSW-D4160-300-AV-M |
| Handling Object | 8 inch Wafer(STD) | 12 inch Wafer(STD) |
| Grip Method | Vacuum grip(STD) | Vacuum grip(STD) |
| Min Rotate Dia. | Ø 450mm | Ø 570mm |
| Gripper Reach | 525mm | 580mm |
| Configuration of Axis | R / T / Z (3 Axis) | R1 / R2 / T / Z (4 Axis) |
| Coordinate System | Cylindrical | Cylindrical |
| Repeatability | Within ±0.1mm | Within ±0.1mm |
| Cleanliness | ISO Class 2 | ISO Class 2 |
| Axis | R Axis | T Axis | Z Axis |
|---|---|---|---|
| Stroke | 400mm (Single) 445mm (Double) | 340deg | 300mm |
| Speed | 200deg/s (1117mm/s) | 400deg/s | 500mm/s |
| Utility | Power Source | Vacuum Pressure | CDA Pressure |
| AC200/230V ±10% | ≤ – 80 kPa | NA | |
| Others | Mapping | Mount Type | Weight |
| Included (thru-beam) | Bottom Mount | Approx. 32kg |
Controller
| Model | VRC4400 |
|---|---|
| Interface | RS232C ethernet and parallel photo I/O |
특징
 정밀한 동작과 최적화된 모션으로
정밀한 동작과 최적화된 모션으로
신속하고 안전한 웨이퍼 핸들링 가능 설비의 설치 환경에 따라
설비의 설치 환경에 따라
베이스타입, 플랜지 타입 선택 가능 높은 신뢰성과
높은 신뢰성과
유지 보수 편의성을 제공 커버를 열지 않고
커버를 열지 않고
엔코더 베터리 교체 가능 직관적인
직관적인
티칭팬던트 UI 구성
VSW-D4160

클린룸 대응 VSW 시리즈
앱솔루트 서보모터를 사용하며 정확하고 안정성이 높은 시리즈
다양한 타입의 그립퍼 적용으로 여러 작업환경에서 워크 반송에 적합한 시리즈
특징
정밀한 동작과 최적화 된 모션으로 신속하고 안전한 웨이퍼 핸들링 가능
설비의 설치 환경에 따라 베이스타입, 플랜지 타입 선택 가능
높은 신뢰성과 유지 보수 편의성을 제공
커버를 열지 않고 엔코더 베터리 교체 가능
직관적인 티칭팬던트 UI 구성

Robot
| Specificatioin | WTR Single | WTR Double |
|---|---|---|
| Model | VSW-S3160-300-AV-M | VSW-D4160-300-AV-M |
| Handling Object | 8 inch Wafer(STD) | 12 inch Wafer(STD) |
| Grip Method | Vacuum grip(STD) | Vacuum grip(STD) |
| Min Rotate Dia. | Ø 450mm | Ø 570mm |
| Gripper Reach | 525mm | 580mm |
| Configuration of Axis | R / T / Z (3 Axis) | R1 / R2 / T / Z (4 Axis) |
| Coordinate System | Cylindrical | Cylindrical |
| Repeatability | Within ±0.1mm | Within ±0.1mm |
| Cleanliness | ISO Class 2 | ISO Class 2 |
| Axis | R Axis | T Axis | Z Axis |
|---|---|---|---|
| Stroke | 400mm (Single) 445mm (Double) | 340deg | 300mm |
| Speed | 200deg/s (1117mm/s) | 400deg/s | 500mm/s |
| Utility | Power Source | Vacuum Pressure | CDA Pressure |
| AC200/230V ±10% | ≤ – 80 kPa | NA | |
| Others | Mapping | Mount Type | Weight |
| Included (thru-beam) | Bottom Mount | Approx. 32kg |
Controller
| Model | VRC4400 |
|---|---|
| Interface | RS232C ethernet and parallel photo I/O |
특징
- 듀얼암 사용으로
웨이퍼 핸들링 시간 단축 - 정밀한 동작과
최적화된 모션으로
신속하고 안전한
웨이퍼 핸들링 가능 - 설비의 설치 환경에 따라
베이스타입, 플랜지 타입
선택 가능 - 높은 신뢰성과
유지 보수 편의성을 제공  커버를 열지 않고
커버를 열지 않고
엔코더 베터리 교체 가능- 직관적인
티칭팬던트 UI 구성
VSAC-RYZ
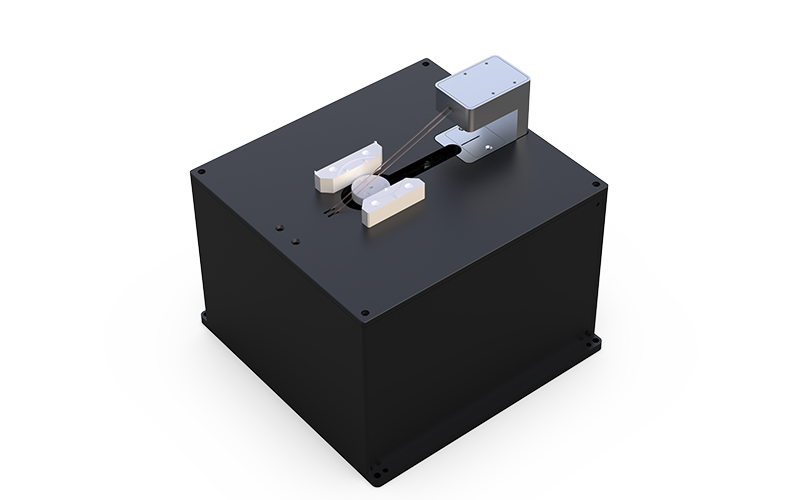
특징
2″, 4″, 6″, 8″ 웨이퍼에 대한 확장성이 뛰어남
위치결정 시간 6초 이내
X, Z, θ 모듈블록으로 유지보수 용이